Current Project 1
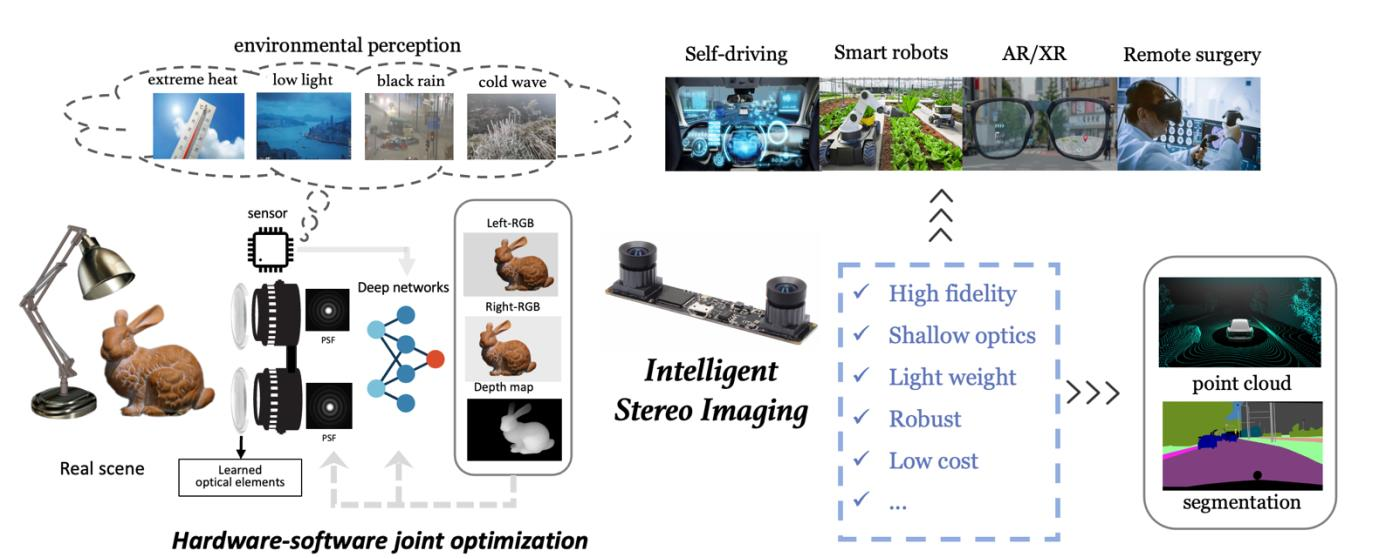
In this project, I am seeking a high-fidelity stereo RGBD imaging paradigm that is different from traditional computer vision approaches. We utilize a shallow depth-of-field blurred image captured by a binocular simple lens system combined with optimizable diffractive optical elements (DOE) to extend the depth of field (DoF) of RGB images, improve resolution, and achieve high-resolution and high-detail depth image output with the assistance of a lightweight network.
This 3D imaging system will leverage the advantages of both binocular and monocular imaging, enhance the utilization of optical coding information to improve imaging quality, and achieve a joint optimization of software and hardware. It has low requirements for optical hardware while being lightweight, making it suitable for adapting to low-light and complex scenes. It has potential applications in areas such as autonomous driving and virtual reality (VR).